
- 1. 参考書籍
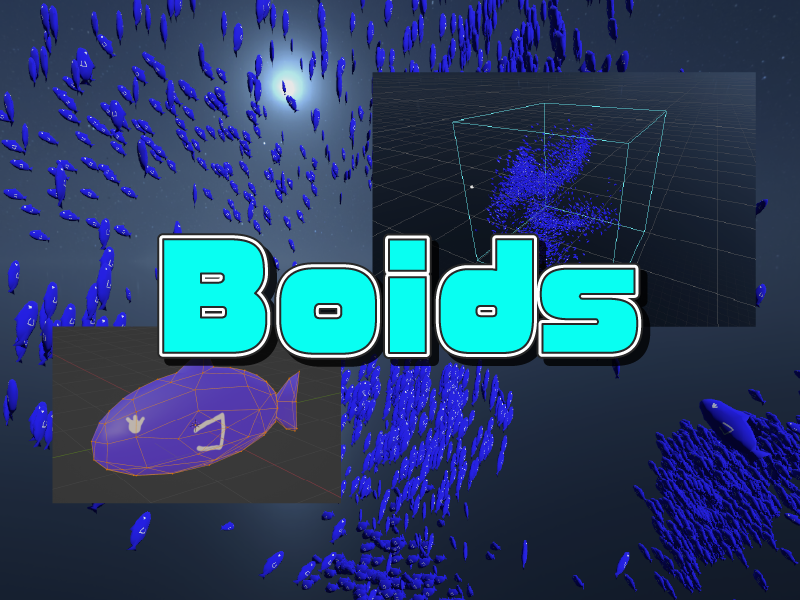
- 2. Boidsアルゴリズムとは
- 1. 分離(Separation)
- 2. 整列(Alignment)
- 3. 結合(Cohesion)
- 4. 最終的な位置の計算
- 5. Boids計算の注意点
- 3. Boidsシミュレーションの実装
- 1. GPUインスタンシングとComputeShader
- 1. ComputeShader
- 2. GPUインスタンシング
- 2. GPUインスタンシングによる描画
- 1. GPUインスタンシングに対応したシェーダーを書く
- 2. マテリアル上で有効にする
- 3. RenderMeshIndirectで描画する
- 3. 群集シミュレーションの実装
- 4. 自作の魚オブジェクトの設定
- 4. おわりに
- ホーム
- 20240528_01_unity_boids
【Unity】Boidsアルゴリズムを用いて魚の群集シミュレーションを実装する
Unityグラフィックス群集シミュレーションGPGPUGPUインスタンシング
2024-05-28
Unityグラフィックス群集シミュレーションGPGPUGPUインスタンシング
2024-05-28
記事をSNSで共有する
著者の各種アカウント
フォローいただけると大変励みになります!
フォローいただけると大変励みになります!
関連記事
【Three.js】カスタムシェーダーでトゥーン+背面法アウトラインを実装する
2026-02-15
【Three.js】Three.js入門 - シーン構築・モデル読み込み・ポストプロセスまで
2026-02-15

【Houdini21.0】3Dビル群っぽいブログヘッダー画像を作成する
2026-01-10

【Houdini21.0】Solaris徹底入門:USD構成を意識した基本的な作業フローについてまとめる
2025-12-31
【ゲーム数学】第十回 p5.js(+α)で学ぶゲーム数学「複素数とフラクタル」
2025-11-02

【プロシージャル】Pythonで学ぶ波動関数崩壊アルゴリズム(Wave Function Collapse)
2025-06-22

【UE5.5】Nanite、Lumen、VSMの概要についてまとめる
2025-05-12

【Unity】Timeline × Excelでスライドショーを効率よく制作する
2024-10-31